信息物理系统(Cyber-Physical Systems, CPS)作为现代工业与智能化的核心,深度融合计算、通信与控制于物理过程,其控制系统的设计需兼顾实时性、鲁棒性与优化性能。在这一背景下,集成鲁棒模型预测控制(Robust Model Predictive Control, RMPC)架构应运而生,结合信息系统集成服务,为CPS提供高效、可靠的解决方案。
一、信息物理系统与模型预测控制基础
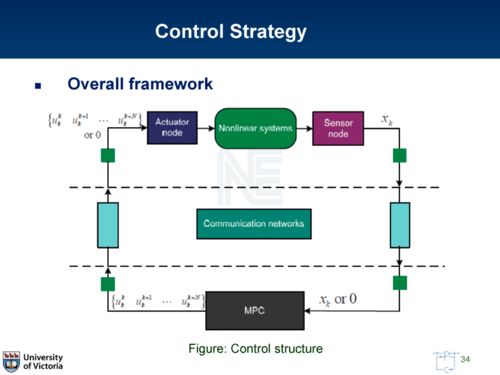
信息物理系统通过传感器、执行器及网络通信实现物理世界与信息空间的交互,其典型应用包括智能电网、自动驾驶和工业4.0。模型预测控制(MPC)作为一种先进控制策略,利用系统模型预测未来行为,并通过优化目标函数生成控制输入,能够有效处理多变量约束问题。传统MPC对模型不确定性和外部扰动敏感,因此在CPS中引入鲁棒性设计至关重要。
二、集成鲁棒模型预测控制架构设计
集成鲁棒模型预测控制架构旨在应对CPS中的不确定性,包括模型误差、噪声和网络延迟。该架构通常包括以下关键组件:
- 鲁棒预测模型:采用集员估计或区间分析等方法,描述系统参数和状态的不确定性,确保预测结果在可行范围内。
- 优化与反馈机制:通过最小-最大优化或约束硬化技术,设计控制律以抵御最坏情况扰动,同时在线调整策略以适应动态变化。
- 信息系统集成:利用云计算、边缘计算和物联网技术,实现数据采集、处理与控制指令的实时传输,提升系统响应速度和可靠性。
三、信息系统集成服务的支撑作用
信息系统集成服务在CPS的RMPC架构中扮演桥梁角色,具体体现在:
- 数据融合与处理:集成多源传感器数据,通过大数据分析和机器学习算法优化模型精度。
- 通信网络保障:采用高可靠性协议(如时间敏感网络TSN)减少延迟和丢包,确保控制指令的及时执行。
- 安全与容错机制:部署入侵检测和冗余备份,防止网络攻击和系统故障,维持鲁棒控制性能。
四、应用案例与前景
以智能制造业为例,集成RMPC架构可应用于机器人装配线:通过预测物料流动和设备状态,动态调整生产计划,并结合信息系统集成服务实现工厂级协同。未来,随着5G、人工智能技术的发展,该架构有望扩展至智慧城市、医疗健康等领域,推动CPS向更高水平的自主化和智能化演进。
信息物理系统的集成鲁棒模型预测控制架构,依托信息系统集成服务,不仅提升了系统的适应性和稳定性,还为复杂环境下的实时控制提供了可行路径。进一步的研究应聚焦于降低计算复杂度、增强自适应能力,以应对日益增长的应用需求。